



Անվտանգության սցենարներում հսկողության սարքավորումները հաճախ ենթարկվում են քամու - Ներմուծվող տատանումների պատճառով հեռավորության վրա տեղադրումը: Մինչ խցիկը Լայն - Անկանի ռեժիմ ցույց է տալիս արտաքին անկարգությունների նվազագույն զգայունությունը, Հեռախոսակապի ռեժիմ Օպտիկականորեն ուժեղացնում են մեխանիկական թրթռումները, ինչը հանգեցնում է զգալի պատկերի բութի կամ նույնիսկ նպատակային կենտրոնացման կորստի: Հետեւաբար, Կայունացման ակտիվ մեխանիզմներ ի հայտ են եկել որպես երկարատեւ տեխնիկական պահանջ, երկարության հսկողության համակարգեր: Ընթացիկ կայունացման տեխնոլոգիաները հիմնականում ընկնում են երկու կատեգորիայի. Օպտիկական պատկերի կայունացում (OIS) մի քանազոր Պատկերի էլեկտրոնային կայունացում (EIS).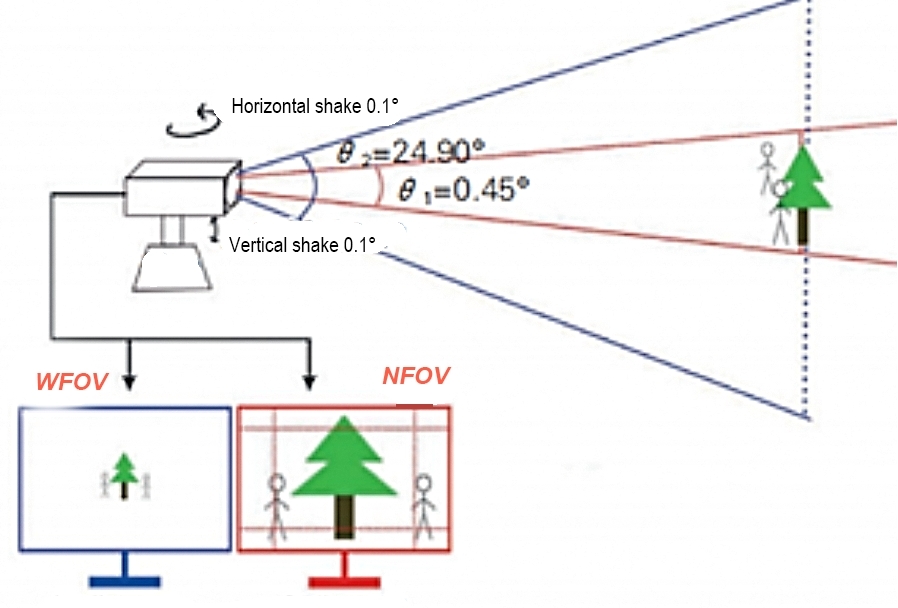
EIS- ն օգտագործում է պատկերի գրառում - Պատկերի կայունացման հասնելու համար ալգորիթմի վերամշակում: Այն պահանջում է ընդլայնել ընթացիկ կրակոցը, ինչը հանգեցնի 10% - Դիտարկման դաշտի 20% կորուստ: EIS Technology- ում ոսպնյակները պատասխանատու են միայն պատկերի ձեռքբերման համար: Սենսորը պատկերն ձեւավորելուց հետո այն նախ պետք է լինի պատկերով կայունացված ներկառուցված ներկառուցված - Պատկերային պրոցեսորի հիմնական ալգորիթմում, ապա տեսանյութը սեղմված է եւ փոխանցվում: Պատկերների կայունացման այս տեսակը ամբողջությամբ ձեռք է բերվում թվային մշակման տեխնոլոգիայի միջոցով, ինչը նվազեցնում է տեսանյութի որակը եւ ունի ընդհանուր կայունացման ազդեցություն: Այն ընդհանուր առմամբ օգտագործվում է ցածր - վերջնական արտադրանքի պատճառով իր ծախսերի առավելության պատճառով:

OIS- ն օգտագործում է ներկառուցված - Gyroscope- ում ոսպնյակների հավաքածուի մեջ `տեսախցիկի թրթռումները հայտնաբերելու համար: Գիրոսկոպը մեխանիկական շարժման տվյալները վերածում է OIS վերահսկիչին փոխանցվող էլեկտրական ազդանշանների: Վերահսկիչի կենտրոնական վերամշակման ստորաբաժանումն անմիջապես վերլուծում է եւ հաշվարկում է տեղաշարժը կամ անկյան տակ, որ ոսպնյակները պետք է փոխհատուցեն եւ օգտագործեն էլեկտրամագնիսական ուժը, որը ստեղծվում է երեք հավաքածու կծիկներով եւ մագնիսներով, որպեսզի ոսպնյակներ ուղղեք, որպեսզի ոսպնյակներ ուղղեք: Օպտիկական ձեւավորման մեջ `ավելացնելով շարժական ոսպնյակ, ոսպնյակների հերթափոխը վերահսկվում է ցնցումների քանակի հիման վրա, փոխհատուցելով օպտիկական ճանապարհը դեպի կայուն պետություն:
Յուրաքանչյուր ազդեցության ցիկլի շրջանակներում OI- ները պետք է հաջորդաբար կատարվեն. Թրթռման հայտնաբերում, ազդանշանի վերամշակում եւ փոխհատուցվող ոսպնյակների ակտիվացում: Ամբողջ գործընթացը servo միջնորդությունն է, որն ունի նաեւ կարճ հայտնաբերման ժամանակի, արագ ազդանշանի մշակման արագության, փոքր ոսպնյակների փոխհատուցման շարժման բնութագրերը եւ ընդունում է պարզ եւ համեմատաբար կայուն PID կառավարման ալգորիթմ: